Tue, Jul 28, 2026
Volume 8, Issue 1 (Spring 2018)
PTJ 2018, 8(1): 17-26 |
Back to browse issues page


Download citation:
BibTeX | RIS | EndNote | Medlars | ProCite | Reference Manager | RefWorks
Send citation to:



BibTeX | RIS | EndNote | Medlars | ProCite | Reference Manager | RefWorks
Send citation to:
Nasirzade A, Mohseni Zonouzi F. Local Asymmetry and Global Symmetry During Jogging in Young Male Athletesetes. PTJ 2018; 8 (1) :17-26
URL: http://ptj.uswr.ac.ir/article-1-336-en.html
URL: http://ptj.uswr.ac.ir/article-1-336-en.html



1- Department of Sports Biomechanics, Faculty of Physical Education and Sports Sciences, Kharazmi University, Tehran, Iran.
2- Department of Sports Biomechanics, Faculty of Physical Education and Sports Sciences, Central Tehran Branch, Islamic Azad University, Tehran, Iran.
2- Department of Sports Biomechanics, Faculty of Physical Education and Sports Sciences, Central Tehran Branch, Islamic Azad University, Tehran, Iran.
Full-Text [PDF 757 kb]
(2438 Downloads)
| Abstract (HTML) (6209 Views)


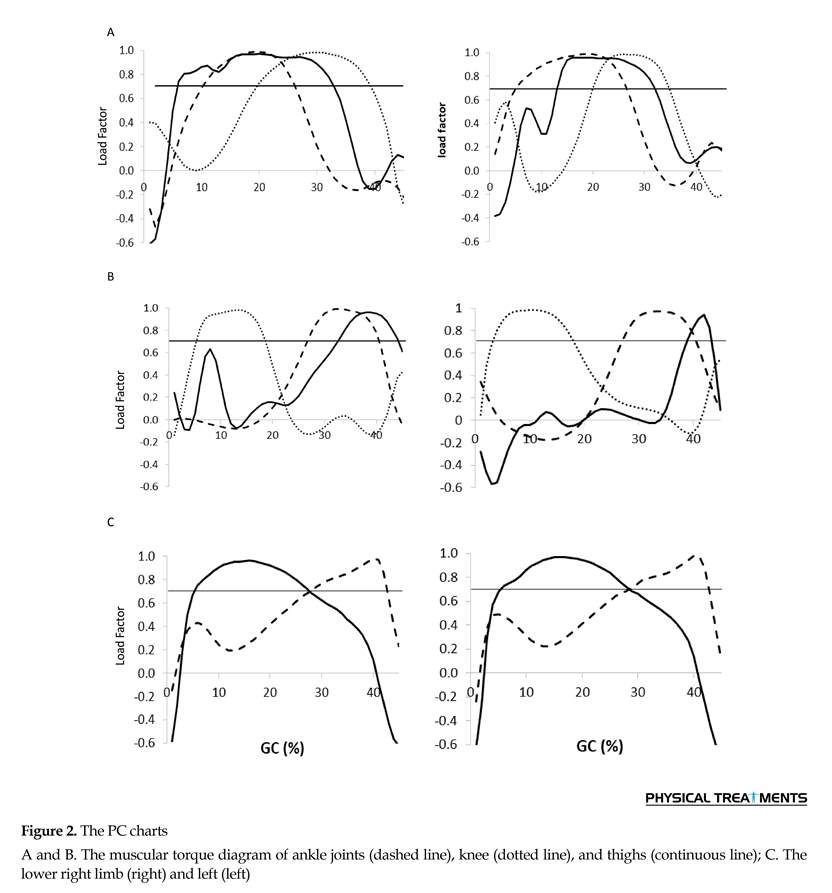
The purpose of PCA is to extract the maximum possible variance of information through several orthogonal components called the PC. In this study, every PC is formed of the same components with the same number as starting phase data, when drawing in relative to the percentage of starting phase, the factor loading diagram will be formed, which is called PC chart (Figure 2). Then, we selected the number of PCs that were going to be used for next analysis. The eigenvalue of each PC reflects how many PCs are required for extracting and justifying the maximum possible amount of data. In the present study, the first 2 PCs, which described more than 70% of the total variance of the information were used for the next stages of biomechanical analysis [11, 16].
The next step included choosing the kind of rotation on PCs to be able to gain more interpretable physiological information through maximizing the changes [17]. Thus, varimax rotation was used in this study [11]. Assigning a physical and biomechanical meaning to each of the PCs was the final step. Knowing what interval running starting phase was significant of each PC chart, and at that interval what the role of muscle activity was, a functional task is arranged for it. To determine when a PC is significant, the muscular torque data with the highest solidarity within each PC (called factor loading) is used for further analysis.
In these circumstances, a factor loading greater than 0.7 was used for the final interpretation [16]. This value may vary, depending on the research type, parameters, and objectives. However, the symmetry among the same joints of the lower limbs was stable when the significant factor loading (above 0.7) of both PC charts described a similar part of the starting phase, which refers to the concept of local symmetry. Moreover, the symmetry between 2 lower extremities was stable when the significant factor loading (above 0.7) of both of their PC charts showed a similar part of the starting phase for dominant and non-dominant lower limbs, which refers to the concept of global symmetry (Table 3 and Figure 2).

3. Results
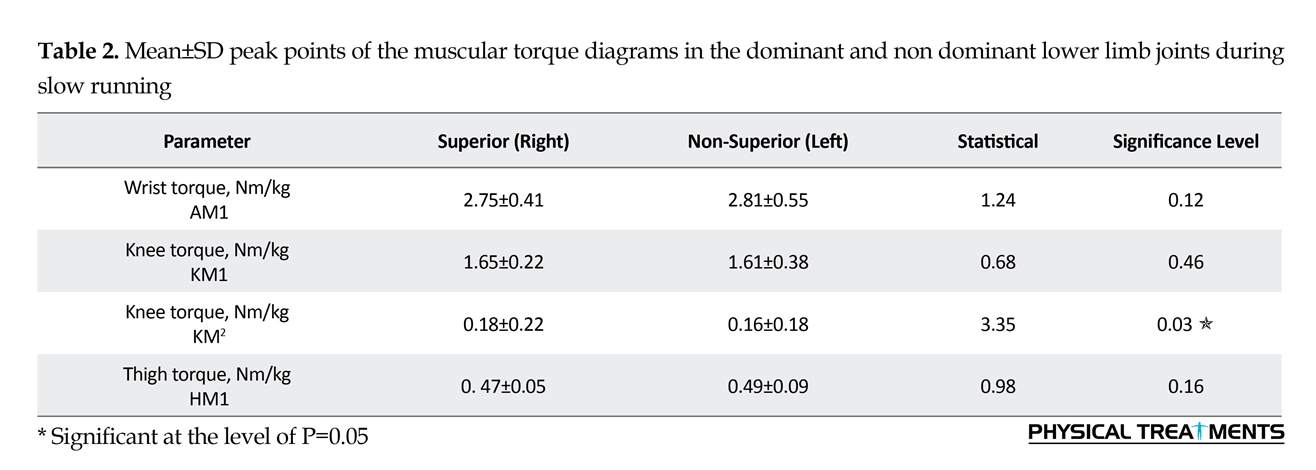
The diagrams of muscular torque of the ankle joints, knees and thighs of the dominant (right) and non-dominant (left) limbs while running are shown in Figure 1. In addition, its spatial-temporal parameters are presented in Table 1, indicating no significant differences in these parameters between the dominant and non-dominant limbs. Table 2 compares the selected peak points of the muscular torque diagrams in the lower dominant and non-dominant limb joints. As demonstrated, there is a significant difference between the left and right limbs with respect to the knee torque in KM2. However, there is no differences between the other peak points in the extremities of the limbs.
Information about the percentage of variance extracted by the PCA test and the interval at which factor loading of PCs have become greater than 0.7 are presented in Table 3 and Figure 2. According to Table 3 and Figure 2, the first and second PCs, while running, display no identical interval of GCs in either knee or thigh joints, which indicates local asymmetry at the surface of these joints. However, in the ankle joint, despite the fact that the interval described by PC1 for the right and left side was not similar (local asymmetry), PC2 shows a similar value indicating the local symmetry for this functional task in this joint. In this case, for the whole limb, PC1 and PC2 have described a similar interval of GC. Thus, in this case, the limbs behave similarly, showing the global symmetry at the lower extremities. Therefore, this group of people during running functionally show local asymmetry (except PC2 for ankles) and global symmetry.
4. Discussion
The present study aimed to investigate local and global symmetry during slow running in young male athletes. Based on the research findings, the spatial-temporal parameters of the lower dominant and non-dominant extremities were not different. In addition, of the selected peaks of the muscular torque curve, there was only one difference between the dominant and non-dominant extremities in one case. In general, based on the results gained from the PCA technique, it seems that joints show asymmetrical behavior (local asymmetry) and lower extremities show symmetrical behavior (global symmetry), during slow running.
To apply methods of surveying the running symmetry in this research, studies on walking symmetry were used that included checking the peaks of different components of the graphs as well as a general review of the gait pattern using some recognition methods such as PCA [3, 4]. In terms of running of healthy people, various studies have only focused on the study of motion-symmetry using the first-order methods. No study (except the present one) has used second-order methods to investigate functional symmetry running. However, in a study using the PCA method to examine functional symmetry during normal walking in healthy right-foot young men, Sadeghi reported local asymmetry (at the joints level) and global symmetry (at the level of limbs) that regardless the type of motion, other findings were consistent with the present study [11].
Based on the present findings on the movements of the running, the PC1 for the ankle showed a region of 10-26% (middle position) for the right leg and 5-26% (the end of the initial and middle position) for the left leg, which indicates local asymmetry for this task. Also, PC2 described the region of 27-40% (end of middle position and the beginning of takeoff) for this joint on both sides of the body, which indicates local symmetry. Normally, in slow running, immediately after heel contact, under the external control of the anterior muscle of the leg, it is flattened on the floor and moves forward on the ankle.
In this condition, the length of plantar flexors of the foot would increase and absorb mechanical energy [18, 19]. Almost by the start of the middle phase position, the ankle starts plantarflexion, and the previous energy absorption stage is followed by a stage of production of energy, whose task is to produce energy to advance [19]. Also, the magnitude of the produced energy by ankle has a direct relation to the running speed [18].
According to the obtained results, PC1 for the right knee showed 20-39% (middle position) and for the left knee 20-34% (middle position); also PC2 for the right knee showed 3-18% (first part of the initial contact and beginning of middle position) and for the left knee 6-18% (second part of the initial contact and beginning of middle position), which clearly manifests local asymmetry. The knee joint bends during running immediately after initial contact and before reaching the middle of the knee position, while being affected by the weight of the body. However, such knee flexion is controlled by the extensor torque of the quadriceps and these muscles absorb energy at this stage [19].
In the second half of the positioning phase, the knee extension phase develops, and the extensor muscles contract concentrically and produce energy. It seems that this energy is produced to help progressive mode of the body [18].
The thigh joint is quite similar to the knee joint, in which the PC1 showed the area of 33-56% (second part of the initial contact and the middle position) for the right and 13-32% (middle position) for the left thigh joint; also, PC2 for the right thigh showed 39-43% (the beginning of takeoff) and for the left thigh joint showed 33-44% (end of the middle position and take off), which a local asymmetry is proved on this joint, too. The motion pattern of thigh joint in running phase is very similar to walking and has a sinusoidal shape, in which at initial contact, flexion occurs and extends reaching to push off [18]. Nevertheless, in terms of performance, according to Winter [19], in jugging or slow running, thigh joints relatively produce lower power and have no stable pattern due to the dual role of hip flexors and extensors while running slowly to maintain upper extremity alongside helping the body drive forward precisely before it fluctuates.
In these conditions, the PCA test shows global symmetry for the lower extremities, so that PC1 highlights the left and right limb in the interval of 6-28%, and PC2 highlights the left and right limb in the interval of 29-43%. Accordingly, in general, local asymmetry in the joints and global symmetry at the limb level are demonstrated in slow running in this group. It seems that the Central Nervous System (CNS) compensatory mechanisms play a vital role in this procedure. Despite the differences in the level of articulation, the compensatory mechanisms cause the limb to function in a similar way to make the move more coordinated and more efficient [2].
An asymmetric gate in which the function of the limb varies in different kinematic or kinetic parameters, results in more interactions and coordinates more complex inter-limb moves towards the gait symmetric behavior and ultimately lead to more involvement of the CNS [20]. As a result, in spite of asymmetry in the joints, it causes the CNS to create symmetrical behavior at the limbs, in order to simplify the movements’ control. However, specifying the compensatory mechanisms on which joint and what surface of the CNS is a problem that has still remained unclear regarding the symmetry of lower limbs during running in healthy people. This matter calls for further investigations on this field.
On the other hand, this study revealed no significant differences between the dominant and non-dominant limbs in such parameters as running speed, step length, and percentage of starting phase. This is actually the result of total operation of all joints in the lower limb. However, there are differences in some of the joint parameters (e.g. the peak of KM2). This finding somehow explains that despite the odds of occurrence of asymmetry in joints, the limbs exhibit symmetric behavior.
The surveys that consider various limbs and joints parameters during running have also provided results similar to this study. Parameters like the joint angle of asymmetry between the limbs have been observed in most cases. While no differences has been observed in parameters like step length and running speed, between the lower extremities during running, Carpes et al. conducted a review study on such articles [5].
Finally, the running tests have been conducted in a 10-m long running route in this study. Because of the shortness of the route, low speed running has been preferred. Thus, we recommend similar studies be conducted with a longer running route and higher speeds to achieve more reliable results.
According to the study findings, it seems that young athlete men during jogging, despite having asymmetric movements in the ankle, knee, and thigh joints (local asymmetry), show symmetric behavior in the lower limbs (global symmetry), which probably is due to the compensating mechanisms of the CNS. The results of such studies may be used in planning of rehabilitation programs for improving physical injuries.
Ethical Considerations
Compliance with ethical guidelines
All ethical principles were considered in this article. The participants were informed about the purpose of the research and its implementation stages; they were also assured about the confidentiality of their information; Moreover, They were allowed to leave the study whenever they wish, and if desired, the results of the research would be available to them.
Funding
This research did not receive any specific grant from funding agencies in the public, commercial, or not-for-profit sectors.
Authors contributions
All authors contributed in preparing this article.
Conflict of interest
The authors declared no conflict of interest.
References
Full-Text: (2149 Views)
1. Introduction
Generally, gait symmetry is defined as a perfect agreement between the actions of the lower limbs [1]. On the other hand, some studies consider the movements symmetrical when the measured values of lower limbs are identical or their differences are not statistically significant [2]. However, despite different definitions, the main idea for elaborating the concept of symmetry in movements like walking and running gait, seems to be that both limbs behave identically [1, 3, 4].
The limbs are expected to have the best fit to produce a rhythmic and smooth movement. Thus, studying the symmetry related to running is important. Asymmetry is frequently recognized among the pathological symptoms of running [5, 6]. Therefore, any disturbance in running may affect the assumed symmetry among the lower limb. Thus, it is important for therapists and educators to consider that running could be symmetrical or asymmetrical in healthy individuals. It could also be essential in planning training programs, evaluating the gate, and providing therapeutic prescriptions for patients who need the rehabilitation for one or both lower limbs, as well as designing artificial limb.
Investigating running symmetry is important in terms of research methodology and clinical study. In the field of research, the symmetry between the lower limbs is considered as default for many biomechanical studies. For example, assuming the lower limbs function symmetry causes a significant reduction in data collection and, subsequently, data analysis [1]. Nevertheless, the unilateral evaluation method fails to examine the limbs functions and mutual effects on themselves, and may cause problems in the evaluation. Given the probable functional differences between the upper and lower limbs [1], it is necessary to consider the effect of symmetry in the research methodology, and mention which limb has been evaluated.
Clinically, walking symmetry/asymmetry is a key point in the studies of diseases and abnormalities. In general, the lower limb malfunction caused by diseases and anomalies negatively affects the walking symmetry [1, 3, 4]. In such condition, walking symmetrically is considered to evaluate the extent of malfunctioning in the patient. Consequently, achieving a complete symmetry or reducing the rate of walking asymmetry in disabled patients, has been used as a method for assessing the effectiveness of the applied treatment model before and after rehabilitation [7, 8].
Few studies have been conducted on symmetry of running. Generally they have focused on pathological aspects and considered the harmful risks for this phenomenon. In general, it seems that the more than 5% increase of ground reaction force peak could increase the risk of tibia injuries, which in turn can increase the risk of lower limb injuries in the long-term [9]. However, a survey on kinetic symmetry on female runners has shown no relation between asymmetry and history of injury [10].
A disputing subject in running symmetry is the dominant and non-dominant limb and the differences between their functions during running. In fact, limb dominance is the tendency to only use the limb of one side to perform certain tasks that are identified in the lower limbs through methods such as preferred leg to start walking or running, kicking a ball, or hopscotch [1]. Very few studies, in this regard, have examined the functional differences between dominant and non-dominant limb and the concept of functional asymmetry in gait. For example, Sadeghi et al. reported that at normal walking speed, the upper and lower extremities have different functions, as control and progress are concerned, which has been supported by other studies [1, 2].
Sadeghi also reported local asymmetry (at the joints) and global symmetry (at the limbs) in healthy young men during normal walking, applying principal component analysis [11]. However, the significant point in this case is the development of functional differences between joints and lower limbs, while running. In general, running involves more pressure on the musculoskeletal system than walking, which results in a more complex interaction of the musculoskeletal system [12].
Functional, kinematic, and kinetic asymmetry in gait, reported in many articles [1, 3, 4], may occur during running as well. Thus, better understanding of functional symmetry of joints and lower limbs during running, regardless of supporting older theories and introducing new ones, is important. This matter is also important in biomechanical planning of rehearsal and rehabilitation programs. Accordingly, this study aimed to investigate the local and global symmetry during jogging in young male athletes.
2. Materials and Methods
This was a quasi-experimental study. Participants included 15 healthy male athletes (Mean±SD age=27.41±3.67 years, Mean±SD height=176.57±5.06 cm, Mean±SD weight=69.84±6.13 kg), who were randomly selected among the students of Physical Education in Kharazmi University of Tehran, in Tehran City, Iran. The number of participants was calculated according to Erdfelder et al. and respecting α=0.05 and β=0.2 [13]. These people had no musculoskeletal and neuromuscular symptoms, or no history of significant surgery affecting their running patterns. Since the leg length differences may affect measured parameters during running, the intera-limb symmetry, and the length of the participants’ legs were measured. We ensured that the differences between the bodies in any participant was not more than 1 cm [14]. The participants had right dominant lower extremities that were determined using the preferred leg method for ball kicking and hopscotch [1].
We explained the research and wearing appropriate clothing to the participants. Vicon Plug-in-Gait marker set (PiG-Vicon Motion Systems, Oxford, UK) was used and light reflector markers with a diameter of 9.5 mm on the spotted points were attached, using double-sided bonding tape. We used a motion analysis system with 6 cameras and videotapes (Mxt40s, Oxford Metrics Ltd., UK) with a 200 Hz sampling frequency for data collection related to markers positions simultaneously and 2 sheets of Kistler (9260AA, Kistler AG, Switzerland) dynamometer with sampling frequency of 1000 Hz to collect reflective force data of the level and position of the center of pressure in the middle of the runway with a 10-m length.
The participants had 10 min to warm up and 15 min of practice tests with the metronome prior to the main tests. They started running barefoot at 155 bpm. The steps frequency was controlled by the metronome. Each movement was performed 5 times by every participant and 3 perfect performances were selected for the next analysis. The test with following qualifications was considered perfect: 1. When the right foot with the first power sheet, and the left foot with the second power sheet contacted properly; 2. The participants did not target the force plates intentionally; and 3. The running frequency was ±2.5% of determined frequency [11, 12].
We used a Butterworth fourth order zero-phase lag filter with a cut-off frequency of 8 Hz for marker position data and 50 Hz for power sheet data to filter the data [15]. An interval between 2 heel-to-ground contacts by the same foot was defined as stride length. In order to calculate the joint torque sagittal plane of ankle, knee, and thigh, inverse dynamics in the Visual3D motion analysis software environment (v. 5.02.30, C-Motion, Inc. USA) were used. Finally, the data were normalized based on body weight and 100% of the total running cycle. Joint torque was proposed based on the contract by the International Society of Biomechanics [15].
According to that, the extensor torque and plantar flexors were considered as positive. The magnitude of selected peaks was also measured in muscular torque diagrams of ankle, knee, and thigh joints in dominant and non-dominant limbs (Figure 1).
The parameters values are presented as Mean±SD. Normal distribution of data was checked by Kolmogorov-Smirnov Test and the data in all subsets had a normal distribution. Paired t-test was used at the significance level of P=0.05. The individual act of each joint and the entire lower limb during running were identified according to the method presented by Sadeghi [11]. Principal Component Analysis (PCA) was used on the phase of muscular torque curves of the joints in the sagittal plane. The muscular torque parameter was selected because, according to Winter [15], the muscular torque provides a clear idea on the mechanical causes of the movement produced by the agonist/antagonist muscles as the integration of neural control over each joint.
Generally, gait symmetry is defined as a perfect agreement between the actions of the lower limbs [1]. On the other hand, some studies consider the movements symmetrical when the measured values of lower limbs are identical or their differences are not statistically significant [2]. However, despite different definitions, the main idea for elaborating the concept of symmetry in movements like walking and running gait, seems to be that both limbs behave identically [1, 3, 4].
The limbs are expected to have the best fit to produce a rhythmic and smooth movement. Thus, studying the symmetry related to running is important. Asymmetry is frequently recognized among the pathological symptoms of running [5, 6]. Therefore, any disturbance in running may affect the assumed symmetry among the lower limb. Thus, it is important for therapists and educators to consider that running could be symmetrical or asymmetrical in healthy individuals. It could also be essential in planning training programs, evaluating the gate, and providing therapeutic prescriptions for patients who need the rehabilitation for one or both lower limbs, as well as designing artificial limb.
Investigating running symmetry is important in terms of research methodology and clinical study. In the field of research, the symmetry between the lower limbs is considered as default for many biomechanical studies. For example, assuming the lower limbs function symmetry causes a significant reduction in data collection and, subsequently, data analysis [1]. Nevertheless, the unilateral evaluation method fails to examine the limbs functions and mutual effects on themselves, and may cause problems in the evaluation. Given the probable functional differences between the upper and lower limbs [1], it is necessary to consider the effect of symmetry in the research methodology, and mention which limb has been evaluated.
Clinically, walking symmetry/asymmetry is a key point in the studies of diseases and abnormalities. In general, the lower limb malfunction caused by diseases and anomalies negatively affects the walking symmetry [1, 3, 4]. In such condition, walking symmetrically is considered to evaluate the extent of malfunctioning in the patient. Consequently, achieving a complete symmetry or reducing the rate of walking asymmetry in disabled patients, has been used as a method for assessing the effectiveness of the applied treatment model before and after rehabilitation [7, 8].
Few studies have been conducted on symmetry of running. Generally they have focused on pathological aspects and considered the harmful risks for this phenomenon. In general, it seems that the more than 5% increase of ground reaction force peak could increase the risk of tibia injuries, which in turn can increase the risk of lower limb injuries in the long-term [9]. However, a survey on kinetic symmetry on female runners has shown no relation between asymmetry and history of injury [10].
A disputing subject in running symmetry is the dominant and non-dominant limb and the differences between their functions during running. In fact, limb dominance is the tendency to only use the limb of one side to perform certain tasks that are identified in the lower limbs through methods such as preferred leg to start walking or running, kicking a ball, or hopscotch [1]. Very few studies, in this regard, have examined the functional differences between dominant and non-dominant limb and the concept of functional asymmetry in gait. For example, Sadeghi et al. reported that at normal walking speed, the upper and lower extremities have different functions, as control and progress are concerned, which has been supported by other studies [1, 2].
Sadeghi also reported local asymmetry (at the joints) and global symmetry (at the limbs) in healthy young men during normal walking, applying principal component analysis [11]. However, the significant point in this case is the development of functional differences between joints and lower limbs, while running. In general, running involves more pressure on the musculoskeletal system than walking, which results in a more complex interaction of the musculoskeletal system [12].
Functional, kinematic, and kinetic asymmetry in gait, reported in many articles [1, 3, 4], may occur during running as well. Thus, better understanding of functional symmetry of joints and lower limbs during running, regardless of supporting older theories and introducing new ones, is important. This matter is also important in biomechanical planning of rehearsal and rehabilitation programs. Accordingly, this study aimed to investigate the local and global symmetry during jogging in young male athletes.
2. Materials and Methods
This was a quasi-experimental study. Participants included 15 healthy male athletes (Mean±SD age=27.41±3.67 years, Mean±SD height=176.57±5.06 cm, Mean±SD weight=69.84±6.13 kg), who were randomly selected among the students of Physical Education in Kharazmi University of Tehran, in Tehran City, Iran. The number of participants was calculated according to Erdfelder et al. and respecting α=0.05 and β=0.2 [13]. These people had no musculoskeletal and neuromuscular symptoms, or no history of significant surgery affecting their running patterns. Since the leg length differences may affect measured parameters during running, the intera-limb symmetry, and the length of the participants’ legs were measured. We ensured that the differences between the bodies in any participant was not more than 1 cm [14]. The participants had right dominant lower extremities that were determined using the preferred leg method for ball kicking and hopscotch [1].
We explained the research and wearing appropriate clothing to the participants. Vicon Plug-in-Gait marker set (PiG-Vicon Motion Systems, Oxford, UK) was used and light reflector markers with a diameter of 9.5 mm on the spotted points were attached, using double-sided bonding tape. We used a motion analysis system with 6 cameras and videotapes (Mxt40s, Oxford Metrics Ltd., UK) with a 200 Hz sampling frequency for data collection related to markers positions simultaneously and 2 sheets of Kistler (9260AA, Kistler AG, Switzerland) dynamometer with sampling frequency of 1000 Hz to collect reflective force data of the level and position of the center of pressure in the middle of the runway with a 10-m length.
The participants had 10 min to warm up and 15 min of practice tests with the metronome prior to the main tests. They started running barefoot at 155 bpm. The steps frequency was controlled by the metronome. Each movement was performed 5 times by every participant and 3 perfect performances were selected for the next analysis. The test with following qualifications was considered perfect: 1. When the right foot with the first power sheet, and the left foot with the second power sheet contacted properly; 2. The participants did not target the force plates intentionally; and 3. The running frequency was ±2.5% of determined frequency [11, 12].
We used a Butterworth fourth order zero-phase lag filter with a cut-off frequency of 8 Hz for marker position data and 50 Hz for power sheet data to filter the data [15]. An interval between 2 heel-to-ground contacts by the same foot was defined as stride length. In order to calculate the joint torque sagittal plane of ankle, knee, and thigh, inverse dynamics in the Visual3D motion analysis software environment (v. 5.02.30, C-Motion, Inc. USA) were used. Finally, the data were normalized based on body weight and 100% of the total running cycle. Joint torque was proposed based on the contract by the International Society of Biomechanics [15].
According to that, the extensor torque and plantar flexors were considered as positive. The magnitude of selected peaks was also measured in muscular torque diagrams of ankle, knee, and thigh joints in dominant and non-dominant limbs (Figure 1).
The parameters values are presented as Mean±SD. Normal distribution of data was checked by Kolmogorov-Smirnov Test and the data in all subsets had a normal distribution. Paired t-test was used at the significance level of P=0.05. The individual act of each joint and the entire lower limb during running were identified according to the method presented by Sadeghi [11]. Principal Component Analysis (PCA) was used on the phase of muscular torque curves of the joints in the sagittal plane. The muscular torque parameter was selected because, according to Winter [15], the muscular torque provides a clear idea on the mechanical causes of the movement produced by the agonist/antagonist muscles as the integration of neural control over each joint.
The PCA technique deals with the data variance and is used to identify the main structure of temporal waveform data in gait, equilibrium, electromyography, and ergonomic studies [2]. In this study, PCA technique was used to identify the functional behavior of each joint, and the complete lower limb, based on the method presented by Sadeghi [11]. In which, when the main Principal Components (PCs) taken from the PCA test elaborate a similar part of the running Gait Cycle (GC), behavioral symmetry is being established (Table 3).
We first formed the covariance matrices to follow the PCA technique. These matrices were acquired from the data of the muscular torque joints starting phase chart, and are made of 45 lines (each for o1 test, 15 participants and repeated 3 times) and 46 columns (representing percentage of starting phase in running). In addition, the total limb was surveyed using the PCA technique, a matrix consisting of 135 lines (first 45 lines belongs to ankle joint, second 45 lines belongs to knee joint, and third 45 lines belongs to thigh joint) and 46 columns was formed.
We first formed the covariance matrices to follow the PCA technique. These matrices were acquired from the data of the muscular torque joints starting phase chart, and are made of 45 lines (each for o1 test, 15 participants and repeated 3 times) and 46 columns (representing percentage of starting phase in running). In addition, the total limb was surveyed using the PCA technique, a matrix consisting of 135 lines (first 45 lines belongs to ankle joint, second 45 lines belongs to knee joint, and third 45 lines belongs to thigh joint) and 46 columns was formed.
The purpose of PCA is to extract the maximum possible variance of information through several orthogonal components called the PC. In this study, every PC is formed of the same components with the same number as starting phase data, when drawing in relative to the percentage of starting phase, the factor loading diagram will be formed, which is called PC chart (Figure 2). Then, we selected the number of PCs that were going to be used for next analysis. The eigenvalue of each PC reflects how many PCs are required for extracting and justifying the maximum possible amount of data. In the present study, the first 2 PCs, which described more than 70% of the total variance of the information were used for the next stages of biomechanical analysis [11, 16].
The next step included choosing the kind of rotation on PCs to be able to gain more interpretable physiological information through maximizing the changes [17]. Thus, varimax rotation was used in this study [11]. Assigning a physical and biomechanical meaning to each of the PCs was the final step. Knowing what interval running starting phase was significant of each PC chart, and at that interval what the role of muscle activity was, a functional task is arranged for it. To determine when a PC is significant, the muscular torque data with the highest solidarity within each PC (called factor loading) is used for further analysis.
In these circumstances, a factor loading greater than 0.7 was used for the final interpretation [16]. This value may vary, depending on the research type, parameters, and objectives. However, the symmetry among the same joints of the lower limbs was stable when the significant factor loading (above 0.7) of both PC charts described a similar part of the starting phase, which refers to the concept of local symmetry. Moreover, the symmetry between 2 lower extremities was stable when the significant factor loading (above 0.7) of both of their PC charts showed a similar part of the starting phase for dominant and non-dominant lower limbs, which refers to the concept of global symmetry (Table 3 and Figure 2).
3. Results
The diagrams of muscular torque of the ankle joints, knees and thighs of the dominant (right) and non-dominant (left) limbs while running are shown in Figure 1. In addition, its spatial-temporal parameters are presented in Table 1, indicating no significant differences in these parameters between the dominant and non-dominant limbs. Table 2 compares the selected peak points of the muscular torque diagrams in the lower dominant and non-dominant limb joints. As demonstrated, there is a significant difference between the left and right limbs with respect to the knee torque in KM2. However, there is no differences between the other peak points in the extremities of the limbs.
Information about the percentage of variance extracted by the PCA test and the interval at which factor loading of PCs have become greater than 0.7 are presented in Table 3 and Figure 2. According to Table 3 and Figure 2, the first and second PCs, while running, display no identical interval of GCs in either knee or thigh joints, which indicates local asymmetry at the surface of these joints. However, in the ankle joint, despite the fact that the interval described by PC1 for the right and left side was not similar (local asymmetry), PC2 shows a similar value indicating the local symmetry for this functional task in this joint. In this case, for the whole limb, PC1 and PC2 have described a similar interval of GC. Thus, in this case, the limbs behave similarly, showing the global symmetry at the lower extremities. Therefore, this group of people during running functionally show local asymmetry (except PC2 for ankles) and global symmetry.
4. Discussion
The present study aimed to investigate local and global symmetry during slow running in young male athletes. Based on the research findings, the spatial-temporal parameters of the lower dominant and non-dominant extremities were not different. In addition, of the selected peaks of the muscular torque curve, there was only one difference between the dominant and non-dominant extremities in one case. In general, based on the results gained from the PCA technique, it seems that joints show asymmetrical behavior (local asymmetry) and lower extremities show symmetrical behavior (global symmetry), during slow running.
To apply methods of surveying the running symmetry in this research, studies on walking symmetry were used that included checking the peaks of different components of the graphs as well as a general review of the gait pattern using some recognition methods such as PCA [3, 4]. In terms of running of healthy people, various studies have only focused on the study of motion-symmetry using the first-order methods. No study (except the present one) has used second-order methods to investigate functional symmetry running. However, in a study using the PCA method to examine functional symmetry during normal walking in healthy right-foot young men, Sadeghi reported local asymmetry (at the joints level) and global symmetry (at the level of limbs) that regardless the type of motion, other findings were consistent with the present study [11].
Based on the present findings on the movements of the running, the PC1 for the ankle showed a region of 10-26% (middle position) for the right leg and 5-26% (the end of the initial and middle position) for the left leg, which indicates local asymmetry for this task. Also, PC2 described the region of 27-40% (end of middle position and the beginning of takeoff) for this joint on both sides of the body, which indicates local symmetry. Normally, in slow running, immediately after heel contact, under the external control of the anterior muscle of the leg, it is flattened on the floor and moves forward on the ankle.
In this condition, the length of plantar flexors of the foot would increase and absorb mechanical energy [18, 19]. Almost by the start of the middle phase position, the ankle starts plantarflexion, and the previous energy absorption stage is followed by a stage of production of energy, whose task is to produce energy to advance [19]. Also, the magnitude of the produced energy by ankle has a direct relation to the running speed [18].
According to the obtained results, PC1 for the right knee showed 20-39% (middle position) and for the left knee 20-34% (middle position); also PC2 for the right knee showed 3-18% (first part of the initial contact and beginning of middle position) and for the left knee 6-18% (second part of the initial contact and beginning of middle position), which clearly manifests local asymmetry. The knee joint bends during running immediately after initial contact and before reaching the middle of the knee position, while being affected by the weight of the body. However, such knee flexion is controlled by the extensor torque of the quadriceps and these muscles absorb energy at this stage [19].
In the second half of the positioning phase, the knee extension phase develops, and the extensor muscles contract concentrically and produce energy. It seems that this energy is produced to help progressive mode of the body [18].
The thigh joint is quite similar to the knee joint, in which the PC1 showed the area of 33-56% (second part of the initial contact and the middle position) for the right and 13-32% (middle position) for the left thigh joint; also, PC2 for the right thigh showed 39-43% (the beginning of takeoff) and for the left thigh joint showed 33-44% (end of the middle position and take off), which a local asymmetry is proved on this joint, too. The motion pattern of thigh joint in running phase is very similar to walking and has a sinusoidal shape, in which at initial contact, flexion occurs and extends reaching to push off [18]. Nevertheless, in terms of performance, according to Winter [19], in jugging or slow running, thigh joints relatively produce lower power and have no stable pattern due to the dual role of hip flexors and extensors while running slowly to maintain upper extremity alongside helping the body drive forward precisely before it fluctuates.
In these conditions, the PCA test shows global symmetry for the lower extremities, so that PC1 highlights the left and right limb in the interval of 6-28%, and PC2 highlights the left and right limb in the interval of 29-43%. Accordingly, in general, local asymmetry in the joints and global symmetry at the limb level are demonstrated in slow running in this group. It seems that the Central Nervous System (CNS) compensatory mechanisms play a vital role in this procedure. Despite the differences in the level of articulation, the compensatory mechanisms cause the limb to function in a similar way to make the move more coordinated and more efficient [2].
An asymmetric gate in which the function of the limb varies in different kinematic or kinetic parameters, results in more interactions and coordinates more complex inter-limb moves towards the gait symmetric behavior and ultimately lead to more involvement of the CNS [20]. As a result, in spite of asymmetry in the joints, it causes the CNS to create symmetrical behavior at the limbs, in order to simplify the movements’ control. However, specifying the compensatory mechanisms on which joint and what surface of the CNS is a problem that has still remained unclear regarding the symmetry of lower limbs during running in healthy people. This matter calls for further investigations on this field.
On the other hand, this study revealed no significant differences between the dominant and non-dominant limbs in such parameters as running speed, step length, and percentage of starting phase. This is actually the result of total operation of all joints in the lower limb. However, there are differences in some of the joint parameters (e.g. the peak of KM2). This finding somehow explains that despite the odds of occurrence of asymmetry in joints, the limbs exhibit symmetric behavior.
The surveys that consider various limbs and joints parameters during running have also provided results similar to this study. Parameters like the joint angle of asymmetry between the limbs have been observed in most cases. While no differences has been observed in parameters like step length and running speed, between the lower extremities during running, Carpes et al. conducted a review study on such articles [5].
Finally, the running tests have been conducted in a 10-m long running route in this study. Because of the shortness of the route, low speed running has been preferred. Thus, we recommend similar studies be conducted with a longer running route and higher speeds to achieve more reliable results.
According to the study findings, it seems that young athlete men during jogging, despite having asymmetric movements in the ankle, knee, and thigh joints (local asymmetry), show symmetric behavior in the lower limbs (global symmetry), which probably is due to the compensating mechanisms of the CNS. The results of such studies may be used in planning of rehabilitation programs for improving physical injuries.
Ethical Considerations
Compliance with ethical guidelines
All ethical principles were considered in this article. The participants were informed about the purpose of the research and its implementation stages; they were also assured about the confidentiality of their information; Moreover, They were allowed to leave the study whenever they wish, and if desired, the results of the research would be available to them.
Funding
This research did not receive any specific grant from funding agencies in the public, commercial, or not-for-profit sectors.
Authors contributions
All authors contributed in preparing this article.
Conflict of interest
The authors declared no conflict of interest.
References
- Sadeghi H, Allard P, Prince F, Labelle H. Symmetry and limb dominance in able-bodied gait: A review. Gait & Posture. 2000; 12(1):34-45. [DOI:10.1016/S0966-6362(00)00070-9]
- Sadeghi H, Allard P, Duhaime M. Functional gait asymmetry in able-bodied subjects. Human Movement Science. 1997; 16(2-3):243-58. [DOI:10.1016/S0167-9457(96)00054-1]
- Nasirzade A, Sadeghi H, Mokhtarinia HR, Rahimi A. Gait symmetry and its evaluation’s Methods: A review. Scientific Journal of Rehabilitation Medicine. 2017; 6(2):283-97. [DOI:10.22037/jrm.2017.1100284]
- Nasirzade A, Sadeghi H, Mokhtarinia HR, Rahimi A. A review of selected factors affecting gait symmetry. Physical Treatments-Specific Physical Therapy Journal. 2017; 7(1):3-12. [DOI:10.29252/nrip.ptj.7.1.3]
- Carpes FP, Mota CB, Faria IE. On the bilateral asymmetry during running and cycling: A review considering leg preference. Physical Therapy in Sport. 2010; 11(4):136-42. [DOI:10.1016/j.ptsp.2010.06.005]
- Nasirzade A, Sadeghi H, Mokhtarinia HR, Rahimi A. The influence of movement velocity on inter-lower-limbs kinematical symmetry in normal walking: Pilot study. Scientific Journal of Rehabilitation Medicine. 2017; 5(4), 159-172. [DOI:10.22037/jrm.2016.1100198]
- Patterson KK, Nadkarni NK, Black SE, McIlroy WE. Gait symmetry and velocity differ in their relationship to age. Gait & Posture. 2012; 35(4):590-4. [DOI:10.1016/j.gaitpost.2011.11.030]
- Hodt-Billington C, Helbostad JL, Vervaat W, Rognsvåg T, Moe-Nilssen R. Criteria of gait asymmetry in patients with hip osteoarthritis. Physiotherapy Theory and Practice. 2012; 28(2):134-41. [DOI:10.3109/09593985.2011.574783]
- Chavet P, Lafortune MA, Gray JR. Asymmetry of lower extremity responses to external impact loading. Human Movement Science. 1997; 16(4):391-406. [DOI:10.1016/S0167-9457(96)00046-2]
- Zifchock RA, Davis I, Higginson J, McCaw S, Royer T. Side-to-side differences in overuse running injury susceptibility: A retrospective study. Human Movement Science. 2008; 27(6):888-902. [DOI:10.1016/j.humov.2008.03.007]
- Sadeghi, H. (2003). Local or global asymmetry in gait of people without impairments. Gait and Posture, 17(3), 197-204. [DOI:10.1016/S0966-6362(02)00089-9]
- Arampatzis A, Brüggemann GP, Metzler V. The effect of speed on leg stiffness and joint kinetics in human running. Journal of Biomechanics. 1999; 32(12):1349-53. [DOI:10.1016/S0021-9290(99)00133-5]
- Erdfelder E, Faul F, Buchner A. GPOWER: A general power analysis program. Behaviour Research Methods, Instruments, & Computers. 1996; 28(1):1-1. [DOI:10.3758/BF03203630]
- Perttunen JR, Anttila E, Södergård J, Merikanto J, Komi PV. Gait asymmetry in patients with limb length discrepancy. Scandinavian Journal of Medicine & Science in Sports. 2004; 14(1):49-56. [DOI:10.1111/j.1600-0838.2003.00307.x]
- Winter DA. Hoboken, New Jersey: Biomechanics and motor control of human movement. Hoboken, New Jersey: John Wiley & Sons; 2009. [DOI:10.1002/9780470549148]
- Sadeghi H, Sadeghi S, Prince F, Allard P, Labelle H, Vaughan CL. Functional roles of ankle and hip sagittal muscle moments in able-bodied gait. Clinical Biomechanics. 2001; 16(8):688-95. [DOI:10.1016/S0268-0033(01)00058-4]
- Davis BL, Vaughan CL. Phasic behaviour of EMG signals during gait: Use of multivariate statistics. Journal of Electromyography and Kinesiology. 1993; 3(1):51-60. [DOI:10.1016/1050-6411(93)90023-P]
- Novacheck TF. The biomechanics of running. Gait and Posture. 1998; 7(1), 77-95. [DOI:10.1016/S0966-6362(97)00038-6]
- Winter DA. Moments of force and mechanical power in jogging. Journal of Biomechanics. 1983; 16(1):91-7. [DOI:10.1016/0021-9290(83)90050-7]
- Hubli M, Dietz V. Movement disorders: Implications for the understanding of motor control. In: Gollhofer A, Taube W, Nielsen JB, editors. Routledge Handbook of Motor Control and Motor Learning. New York: Routledge; 2013. [DOI:10.4324/9780203132746.ch18]
Type of Study: Research |
Subject:
General
Received: 2017/10/31 | Accepted: 2018/10/13 | Published: 2019/02/19
Received: 2017/10/31 | Accepted: 2018/10/13 | Published: 2019/02/19
References
1. Sadeghi H, Allard P, Prince F, Labelle H. Symmetry and limb dominance in able-bodied gait: A review. Gait & Posture. 2000; 12(1):34-45. [DOI:10.1016/S0966-6362(00)00070-9] [DOI:10.1016/S0966-6362(00)00070-9]
2. Sadeghi H, Allard P, Duhaime M. Functional gait asymmetry in able-bodied subjects. Human Movement Science. 1997; 16(2-3):243-58. [DOI:10.1016/S0167-9457(96)00054-1] [DOI:10.1016/S0167-9457(96)00054-1]
3. Nasirzade A, Sadeghi H, Mokhtarinia HR, Rahimi A. Gait symmetry and its evaluation's Methods: A review. Scientific Journal of Rehabilitation Medicine. 2017; 6(2):283-97. [DOI:10.22037/jrm.2017.1100284]
4. Nasirzade A, Sadeghi H, Mokhtarinia HR, Rahimi A. A review of selected factors affecting gait symmetry. Physical Treatments-Specific Physical Therapy Journal. 2017; 7(1):3-12. [DOI:10.29252/nrip.ptj.7.1.3] [DOI:10.29252/nrip.ptj.7.1.3]
5. Carpes FP, Mota CB, Faria IE. On the bilateral asymmetry during running and cycling: A review considering leg preference. Physical Therapy in Sport. 2010; 11(4):136-42. [DOI:10.1016/j.ptsp.2010.06.005] [DOI:10.1016/j.ptsp.2010.06.005]
6. Nasirzade A, Sadeghi H, Mokhtarinia HR, Rahimi A. The influence of movement velocity on inter-lower-limbs kinematical symmetry in normal walking: Pilot study. Scientific Journal of Rehabilitation Medicine. 2017; 5(4), 159-172. [DOI:10.22037/jrm.2016.1100198]
7. Patterson KK, Nadkarni NK, Black SE, McIlroy WE. Gait symmetry and velocity differ in their relationship to age. Gait & Posture. 2012; 35(4):590-4. [DOI:10.1016/j.gaitpost.2011.11.030] [DOI:10.1016/j.gaitpost.2011.11.030]
8. Hodt-Billington C, Helbostad JL, Vervaat W, Rognsvåg T, Moe-Nilssen R. Criteria of gait asymmetry in patients with hip osteoarthritis. Physiotherapy Theory and Practice. 2012; 28(2):134-41. [DOI:10.3109/09593985.2011.574783] [DOI:10.3109/09593985.2011.574783]
9. Chavet P, Lafortune MA, Gray JR. Asymmetry of lower extremity responses to external impact loading. Human Movement Science. 1997; 16(4):391-406. [DOI:10.1016/S0167-9457(96)00046-2] [DOI:10.1016/S0167-9457(96)00046-2]
10. Zifchock RA, Davis I, Higginson J, McCaw S, Royer T. Side-to-side differences in overuse running injury susceptibility: A retrospective study. Human Movement Science. 2008; 27(6):888-902. [DOI:10.1016/j.humov.2008.03.007] [DOI:10.1016/j.humov.2008.03.007]
11. Sadeghi, H. (2003). Local or global asymmetry in gait of people without impairments. Gait and Posture, 17(3), 197-204. [DOI:10.1016/S0966-6362(02)00089-9] [DOI:10.1016/S0966-6362(02)00089-9]
12. Arampatzis A, Brüggemann GP, Metzler V. The effect of speed on leg stiffness and joint kinetics in human running. Journal of Biomechanics. 1999; 32(12):1349-53. [DOI:10.1016/S0021-9290(99)00133-5] [DOI:10.1016/S0021-9290(99)00133-5]
13. Erdfelder E, Faul F, Buchner A. GPOWER: A general power analysis program. Behaviour Research Methods, Instruments, & Computers. 1996; 28(1):1-1. [DOI:10.3758/BF03203630] [DOI:10.3758/BF03203630]
14. Perttunen JR, Anttila E, Södergård J, Merikanto J, Komi PV. Gait asymmetry in patients with limb length discrepancy. Scandinavian Journal of Medicine & Science in Sports. 2004; 14(1):49-56. [DOI:10.1111/j.1600-0838.2003.00307.x] [DOI:10.1111/j.1600-0838.2003.00307.x]
15. Winter DA. Hoboken, New Jersey: Biomechanics and motor control of human movement. Hoboken, New Jersey: John Wiley & Sons; 2009. [DOI:10.1002/9780470549148] [DOI:10.1002/9780470549148]
16. Sadeghi H, Sadeghi S, Prince F, Allard P, Labelle H, Vaughan CL. Functional roles of ankle and hip sagittal muscle moments in able-bodied gait. Clinical Biomechanics. 2001; 16(8):688-95. [DOI:10.1016/S0268-0033(01)00058-4] [DOI:10.1016/S0268-0033(01)00058-4]
17. Davis BL, Vaughan CL. Phasic behaviour of EMG signals during gait: Use of multivariate statistics. Journal of Electromyography and Kinesiology. 1993; 3(1):51-60. [DOI:10.1016/1050-6411(93)90023-P] [DOI:10.1016/1050-6411(93)90023-P]
18. Novacheck TF. The biomechanics of running. Gait and Posture. 1998; 7(1), 77-95. [DOI:10.1016/S0966-6362(97)00038-6] [DOI:10.1016/S0966-6362(97)00038-6]
19. Winter DA. Moments of force and mechanical power in jogging. Journal of Biomechanics. 1983; 16(1):91-7. [DOI:10.1016/0021-9290(83)90050-7] [DOI:10.1016/0021-9290(83)90050-7]
20. Hubli M, Dietz V. Movement disorders: Implications for the understanding of motor control. In: Gollhofer A, Taube W, Nielsen JB, editors. Routledge Handbook of Motor Control and Motor Learning. New York: Routledge; 2013. [DOI:10.4324/9780203132746.ch18] [DOI:10.4324/9780203132746.ch18]
Send email to the article author
| Rights and permissions | |
 |
This work is licensed under a Creative Commons Attribution-NonCommercial 4.0 International License. |
This is an open access article distributed under the terms of the Creative Commons Attribution-NonCommercial 4.0 (CC-By-NC 4.0), which permits use, distribution, and reproduction in any medium, provided the original work is properly cited and is not used for commercial purposes.
Contact Information
